什么是自动驾驶仿真技术
1.1 基本概念定义
1) 自动驾驶仿真技术是计算机仿真技术在汽车领域的应用,它比传统ADAS仿真系统研发更为复杂,对系统在解耦和架构上的要求非常高;
2)类似其他通用仿真平台,它必须尽可能的真实,而对仿真系统进行分析和研究的一个基础性和关键性的问题就是将系统模型化;
3)通过数学建模的方式将真实世界进行数字化还原和泛化,建立正确、可靠、有效的仿真模型是保证仿真结果具有高可信度的关键和前提。
4)仿真技术的基本原理是在仿真场景内,将真实控制器变成算法,结合传感器仿真等技术,完成对算法的测试和验证。
1.2 自动驾驶仿真平台
一个完整的自动驾驶仿真平台,需要包括静态场景还原、动态案例仿真、传感器仿真、车辆动力学仿真、并行加速计算等功能,并能够较为容易的接入自动驾驶感知和决策控制系统;只有算法与仿真平台紧密结合,才能形成一个闭环,达到持续迭代和优化的状态。
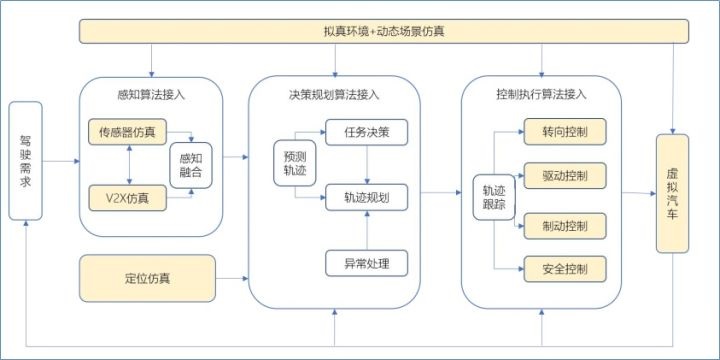
自动驾驶仿真系统模块
1)静态场景构建方案
a、可以采集实际环境信息及已有的高精度地图构建静态场景,通过采集激光点云数据,建立高精度地图,构建环境模型,并通过自动化工具链完成厘米级道路还原。
b、静态场景数据编辑和自动生成技术,可基于实体场景完成真实道路自动化还原,也可以对道路周围树木及信号灯等标识根据不同拓扑结构进行自动的排布组合,生成更多的衍生虚拟场景。
c、人为创建所需的环境,可以只包括那些简单的典型道路和场景,也可以把复杂的立交桥,隧道,各种障碍物,车道线和交通标志包括进来,用于不同的仿真测试和训练目的。

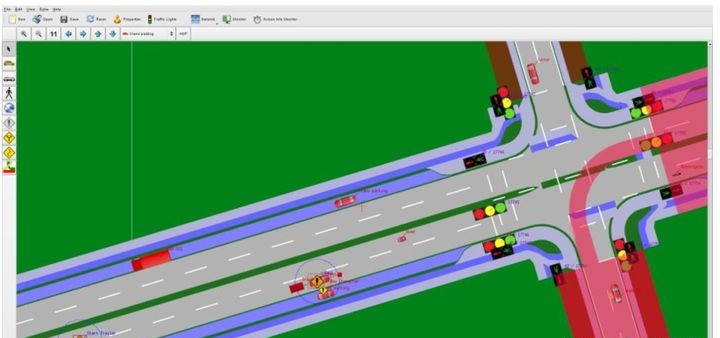
典型道路 - 环岛场景构建示例
交通信号灯、车道线等静态场景构建示例
2) 动态场景构建方案
a、用实际路上采集的海量真实数据,经过算法抽取,结合已有的高精地图,做动态场景重建;
b、对多元类型数据进行整合与加工,通过算法构建逼近真实的智能体行为模型,可实现差异化动态场景的快速搭建;
c、随机交通流的生成可模拟复杂的交通环境,通过设置车辆,行人,非机动车的密度,根据统计学的比例自动生成,大大提升了整个场景搭建的速度;
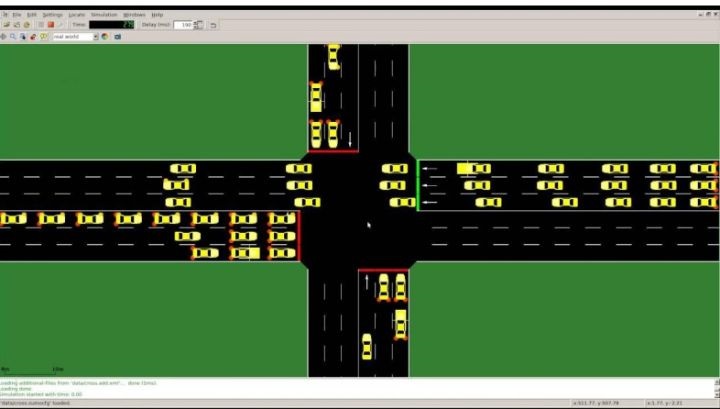
连续交通流仿真的可视化界面示例
3)传感器仿真
即环境感知传感器的建模能力需要对传感器物理原理的大量先验知识和经验。传感器仿真三个不同层级的仿真:
a、物理信号的仿真 - 就是直接仿真传感器接收到的信号,如摄像头:直接仿真摄像头检测到的光学信号;雷达:直接仿真声波和电磁波信号。
b、原始信号仿真 - 即把传感器的探测单元拆掉,因为控制电控嵌入系统中有专门的数字处理芯片,可以直接仿真数字处理芯片的输入单元。
c、目标级信号仿真 - 目标级输入信号一般是CAN总线输入信号或者其他通讯协议格式输入信号。比如差分GPS和IMU可以通过串口通讯来仿真。

传感器仿真层级结构图
4)车辆动力学仿真
一般将车辆模型参数化,包括:车体模型参数化,轮胎模型参数化,制动系统模型参数化,转向系统模型参数化,动力系统模型参数化,传动系统模型参数化,空气动力学模型参数化,硬件IO接口模型参数化,根据实际测试车辆的动力学配置合适的参数。使用这些复杂的车辆参数,可以保证车辆的仿真精度更高,使被控对象更接近于真实的对象。

车辆动力学仿真测试示例
5)并行计算
a、在有了丰富的交通场景库,准确的传感器模型和车辆动力学仿真模型后,如何通过仿真平台加速自动驾驶算法测试和验证的迭代周期,这一问题可以通过纯软件方式的并行计算架构实现;
b、并行计算或称平行计算是相对于串行计算来说的,它是一种一次可执行多个指令的算法,目的是提高计算速度,以及通过扩大问题求解规模,以解决大型而复杂的计算问题。
c、并行计算可分为时间上的并行和空间上的并行。时间上的并行就是指流水线技术,而空间上的并行则是指用多个处理器并发的执行计算;
